
逐际动力人形机器人新进展:跑步、上楼梯
2024-04-11 14:31 来源:深圳新闻网
人工智能朗读:


深圳新闻网2024年4月11日讯(记者 叶梅)4月11日,逐际动力公开人形机器人最新进展,CL-1完成了一步一阶上楼梯和往返跑步,在实时地形感知、全身运动控制以及硬件平台的性能上得到了进一步的提升。
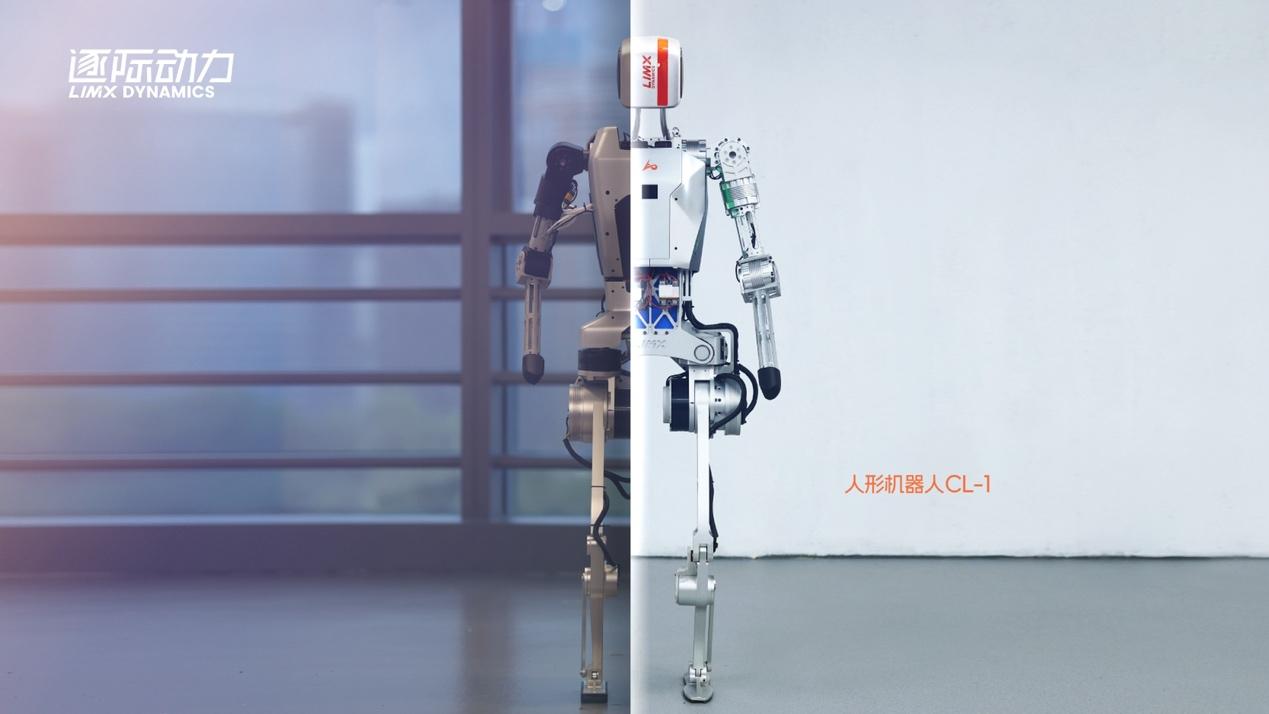
逐际动力人形机器人CL-1新进展:一步一阶上楼梯、往返跑步
在视频画面中,我们可以发现,逐际动力CL-1基于实时地形感知,左右脚交替、一步一阶上楼梯,达到更类人的动态上楼梯效果。CL-1从静止、起跑、加速到减速、停止,还有往返跑步,全过程连续、动态完成。
为了达成此效果,逐际动力在软、硬件均进行了升级、改良。在软件方面,CL-1结合更实时、更精准的地形感知信息,实现了较之前更快、更大、更稳的上楼梯步伐。同时,为了优化人形机器人的高动态运动,逐际动力进一步迭代了全身运动控制算法。通过对全身动作的实时规划,CL-1在这次测试中手臂与腿部的动作更加协调,身体在运动过程中的晃动显著减小。
在硬件方面,不管是以更大的步伐上楼梯,还是往返跑步,对机器人的动力性能以及稳定性都提出了更苛刻的要求。针对这一要求,CL-1 提升了关节性能(力矩、转速性能、响应速度),并优化了整机的结构设计,以更轻的整机重量达到更强的抗冲击性能,兼顾机器人的动力性能和稳定性。
逐际动力升级了实时地形感知、全身运动控制算法,以及关节性能和整机结构设计
在这次测试中,CL-1流畅地切换跑步的速度,完成从静止到起跑、从跑步到停止的整套运动,并做到更大的跑步步幅,实现跑起来,而不止走得快的高动态效果。事实上,要实现稳定可控的人形机器人跑步,面临的主要挑战包括:运动周期长,重心高度变化大,对运动规划的性能要求高;跑步需要双脚同时腾空,增加了状态估计的难度,需要协调控制人形机器人全身肢体的运动;对机器人整机硬件的动力以及稳定性要求高,包括关节功率密度更高、全身结构抗冲击性更强等。
逐际动力人形机器人CL-1
面对人形机器人跑步这一难题,逐际动力的研发路线聚焦全身运动控制算法和硬件系统两大方向,系统化地理解并分析跑步运动背后的运动控制问题。随着研发的不断深入,逐际动力的人形机器人CL-1将进一步结合实时感知和强化学习(Reinforcement Learning),带来更多新的突破。
(本文图片由逐际动力提供)
